
Lieu d'origine:
La Chine
Nom de marque:
YOUNGYOU
Certification:
CE
Numéro de modèle:
PY4030U-050
Contact USA
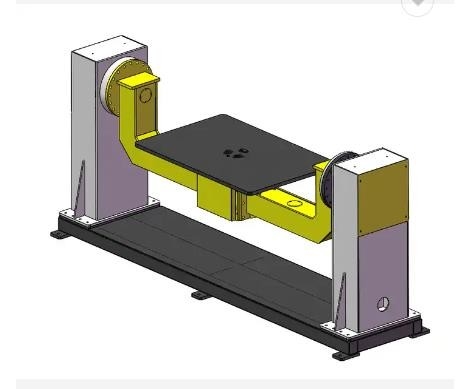




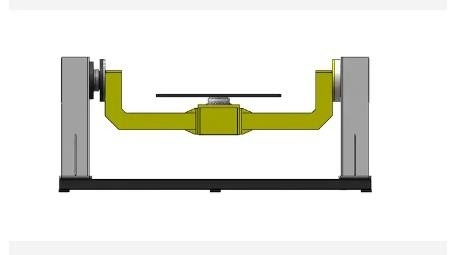
Fait dans le positionneur de soudure biaxiale de la charge 100-1000kg d'axe de la plaque tournante 380v 50-60hz de la porcelaine 1200*1200
Navigation de réflexion de la lumière et technologie de positionnement pour les robots mobiles
La navigation typique de réflexion de la lumière plaçant la méthode utilisation principal le laser ou les capteurs infrarouges pour le rangement. Laser et infrarouge employer la technologie de réflexion de la lumière pour la navigation et le positionnement.
Le système de localisation mondial de laser se compose généralement d'un mécanisme de rotation de laser, d'un réflecteur, d'un dispositif de réception optoélectronique, et d'un dispositif par acquisition de données et de transmission.
Lors du fonctionnement, le laser est émis à l'extérieur par un mécanisme de miroir tournant. En balayant un point de repère coopératif composé de réflecteur arrière, la lumière réfléchie est traitée par un récepteur photoélectrique comme signal de détection. Le programme par acquisition de données est commencé pour lire les données de disque codeur du mécanisme de rotation (la valeur mesurée d'angle de la cible), et puis transmis à l'ordinateur supérieur pour l'informatique par la communication. Basé sur la position connue du point de repère et de l'information détectée, la situation actuelle et la direction du capteur dans le système du même rang de point de repère peuvent être calculées pour réaliser davantage de navigation et de positionnement.
La chaîne de laser a les avantages de la poutre étroite, bon parallélisme, petite dispersion, et de haute résolution dans la direction de rangement, mais elle est également considérablement affectée par des facteurs environnementaux. Par conséquent, comment au denoise le signal rassemblé en employant le rangement de laser est également un défi important. En outre, le laser s'étendant également a des taches aveugles, le rendant difficile de réaliser la navigation et le plaçant seulement par le laser. Dans des applications industrielles, généralement, il est encore très utilisé dans l'essai sur place industriel dans une marge spécifique, telle que détecter des fissures de canalisation.
La technologie de détection infrarouge est employée souvent dans les systèmes communs multi de manière d'éviter d'obstacle de robot pour former une vaste zone du robot « peau sensible » qui couvre la surface du bras de robot et peut détecter de divers objets produits par le bras de robot lors du fonctionnement.
Un capteur infrarouge typique inclut une diode électroluminescente à semi-conducteur qui peut émettre la lumière infrarouge et une diode photosensible à semi-conducteur qui sert de récepteur. Le signal modulé est émis par un tube luminescent infrarouge, et le tube photosensible infrarouge reçoit le signal modulé infrarouge reflété par la cible. L'élimination de l'interférence infrarouge environnementale est assurée par la modulation de signal et un filtre infrarouge consacré. Si la Vo du signal de sortie représente la sortie de tension de l'intensité de la lumière réfléchie, alors la Vo est une fonction de la distance entre la sonde et l'objet : Vo=f (x, p), où p est le coefficient de réflexion de l'objet. P est lié à la couleur et à la rugosité extérieures de l'objet de cible. X - distance entre la sonde et l'objet.
Quand l'objet est une cible du même type avec la même p-valeur, x et Vo correspondent linéaire. X peut être obtenu en interpolant les données expérimentales des mesures de proximité de divers objets de cible. De cette façon, la distance entre le robot et l'objet de cible peut être mesurée utilisant les capteurs infrarouges, et d'autres méthodes de traitement de l'information peuvent également être employées pour diriger et localiser le robot mobile.
Bien que le positionnement de détection infrarouge également ait des avantages tels que la sensibilité élevée, la structure simple, et le coût bas, dû à leur résolution courbe et à basse résolution de distance, ils sont utilisés généralement comme capteurs de proximité dans des robots mobiles pour détecter l'approche ou les obstacles soudains de mouvement, facilitant l'arrêt de secours des robots.
![]()
Au sujet de la société
Notre rail de guide a coopéré avec beaucoup de marques bien connues internationales de robot, telles qu'ABB KUKA FANUC Yaskawa UR. Les sociétés impliquées incluent principalement la palletisation, le chargement et le déchargement. La charge des gammes de rail de guide de 500kg à 5000kg. La longueur du rail de guide est adaptée aux besoins du client selon les besoins des clients. Nous avons fait un cas qu'un robot d'ABB IRB6700 correspond à 20 machines de commande numérique par ordinateur, et un 50m long rail de guide accomplit le mouvement d'échange, chargeant et déchargeant du robot. Le nombre de robots est considérablement réduit et le coût d'intégration est épargné.
Notre société offre également les robots industriels aux prix très favorables pour passer des commandes ensemble aux prix inférieurs.
Accueil vers Changhaï, Chine, pour étudier nos robots et rails !
Approvisionnement de produit de société
Robot d'ABB
Robot de KUKA
Robot de Yaskawa
Robot de Fanuc
Robot d'UR
Cobot
Rail de guide
Cobot a fait en Chine
Spécifications produit
Table de paramètres de produit


Emballage et transport
![]()
![]()
Envoyez-votre enquête directement nous




