Lieu d'origine:
La Chine
Nom de marque:
YOUNGYOU
Certification:
CE
Numéro de modèle:
EW-05-Z1-W500-B
Contact USA




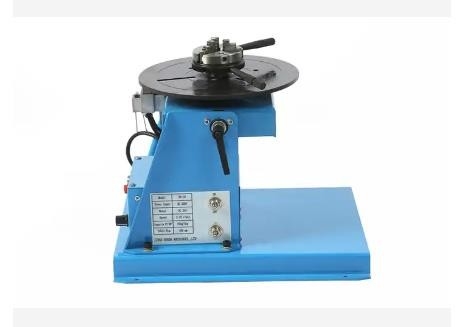

10KG positionneur de soudure de manipulateur rotatoire automatique spécial de la commande numérique par ordinateur Mini Small Table Chuck Robot
Description de produit
10KG manipulateur rotatoire automatique spécial WeldingPositioner de la commande numérique par ordinateur Mini Small Table Chuck Robot à vendre
le positionneur 10kg de soudure de faible puissance est conçu pour la rotation des morceaux plus légers de travail.
Le positionneur de soudure est utilisé pour le rond, la circulaire soudant, la coupure, le polissage et l'assemblée.
Détails de produit
1, PETIT ET LÉGER, SUITABLEFOR PETITES PIÈCES
2, LA MACHINE PEUVENT ÊTRE ÉQUIPÉS DE SOUDER CHUCKANDGUN AJUSTANT LE MÉCANISME POUR FIXER LA POSITION DU CHALUMEAU ET DU DESSUS PNEUMATIQUE DE QUEUE POUR MAINTENIR L'OBJET DE DEUX ENDSOF CONCENTRIQUE
3, DE PETITE TAILLE, LÉGER, CERTIFICATION DE LA CE
POSITIONNEUR DE SMALLWELDING
système de localisation mondial
De nos jours, dans l'application de la navigation et de la technologie de positionnement pour les robots intelligents, la méthode de positionnement dynamique de pseudo différentiel de gamme est généralement employée. Le récepteur de référence et le récepteur dynamique sont employés pour observer conjointement quatre satellites de GPS. Selon un certain algorithme, les coordonnées de position tridimensionnelles du robot à un certain temps et le moment peuvent être obtenus. Le positionnement dynamique différentiel élimine l'erreur d'horloge d'étoile. Pour des utilisateurs 1000 kilomètres à partir de la station de référence, il peut éliminer l'erreur d'horloge d'étoile et l'erreur troposphérique, de ce fait de manière significative améliorant l'exactitude du positionnement dynamique.
Cependant, dans la navigation mobile, l'exactitude de positionnement des récepteurs mobiles de GPS est affectée par les conditions de signal et l'environnement satellites de route, aussi bien que beaucoup de facteurs tels que l'erreur d'horloge, l'erreur de propagation, le bruit de récepteur, etc. Par conséquent, utilisant GPS seule la navigation a des problèmes de basse exactitude de positionnement et de basse fiabilité. Par conséquent, dans des applications de navigation de robot, des boussoles magnétiques, les disques codeurs optiques, et les données de GPS sont habituellement employés pour la navigation. En outre, les systèmes de navigation de GPS ne sont pas appropriés aux systèmes d'intérieur ou sous-marine navigation de robot, aussi bien que de robot qui exigent l'exactitude de position élevée.
Au sujet de la société
Notre rail de guide a coopéré avec beaucoup de marques bien connues internationales de robot, telles qu'ABB KUKA FANUC Yaskawa UR. Les sociétés impliquées incluent principalement la palletisation, le chargement et le déchargement. La charge des gammes de rail de guide de 500kg à 5000kg. La longueur du rail de guide est adaptée aux besoins du client selon les besoins des clients. Nous avons fait un cas qu'un robot d'ABB IRB6700 correspond à 20 machines de commande numérique par ordinateur, et un 50m long rail de guide accomplit le mouvement d'échange, chargeant et déchargeant du robot. Le nombre de robots est considérablement réduit et le coût d'intégration est épargné.
Notre société offre également les robots industriels aux prix très favorables pour passer des commandes ensemble aux prix inférieurs.
Accueil vers Changhaï, Chine, pour étudier nos robots et rails !
Approvisionnement de produit de société
Robot d'ABB
Robot de KUKA
Robot de Yaskawa
Robot de Fanuc
Robot d'UR
Cobot
Rail de guide
Cobot a fait en Chine
Spécifications produit
Table de paramètres de produit
Emballage et transport
![]()
![]()
Envoyez-votre enquête directement nous