

2023-07-12
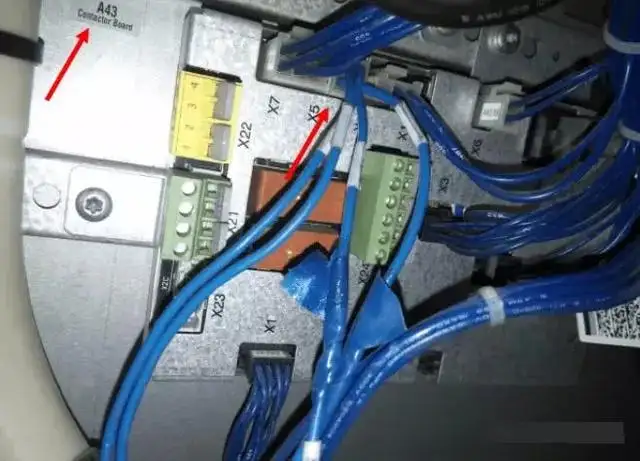
2. Manipulation du défaut de court-circuit du conseil de court-circuit de module d'alimentation de robot d'ABB
Facteurs humains : Le matériel de permutation chaude est très dangereux, et beaucoup d'échecs de carte sont provoqués par la permutation chaude. L'usage de la force inexact en insérant des cartes et des prises avec la puissance peut endommager les interfaces, puces, etc., menant pour endommager à la carte de robot ; Car la période d'employer des augmentations de robots, les composants sur la carte de robot vieilliront naturellement, menant aux échecs de carte de robot.
Facteurs environnementaux : En raison de l'entretien inexact par l'opérateur, la carte de robot est couverte de poussière, qui peut causer des courts-circuits de signal.
3. Quand est il nécessaire des robots industriels de secours
Après la première mise sous tension de la nouvelle machine.
Avant d'apporter toutes les modifications.
3. Après exécution des modifications.
4. Si les robots industriels sont importants, ils devraient être faits une fois par semaine de façon régulière.
5. Il est le meilleur de faire un support sur la commande d'USB aussi bien.
6. supprimez régulièrement les vieux supports pour libérer l'espace d'unité de disque dur.
4. Comment manipuler la situation où le robot est branché et le pendant de enseignement continue à montrer l'interface suivante
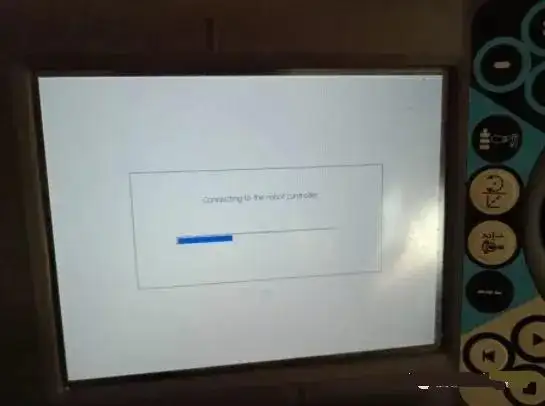 La situation ci-dessus est qu'il n'y a aucune connexion de communication établie entre l'enseignement pendant et le contrôleur principal du robot, et les raisons de ne pas établir la connexion pour inclure :
La situation ci-dessus est qu'il n'y a aucune connexion de communication établie entre l'enseignement pendant et le contrôleur principal du robot, et les raisons de ne pas établir la connexion pour inclure :
1. Le centre serveur de robot est défectueux.
2. La carte intégrée de CF (carte d'écart-type) du centre serveur de robot est défectueuse.
3. Le câble de réseau entre le pendant de enseignement et le centre serveur est lâche, etc.
Méthode de transformation : 1. Vérifiez si le centre serveur est normal et si la carte d'écart-type dans le centre serveur est normale.
2. Vérifiez si le câble de réseau du pendant de enseignement au centre serveur est relié correctement.
5. Quelle est la signification du rappel de temps d'entretien 10106 quand le robot affiche un message d'alarme ?
Cette situation est un rappel intelligent d'entretien périodique de robot d'ABB.
6. Comment manipuler un défaut de fonctionnement de système quand le robot entre dans un état de puissance dessus ?
1. Remettez en marche le robot une fois.
Sinon, contrôle le pendant de enseignement pour des invites plus détaillées d'alarme et agir.
3. reprise.
4. S'il ne peut pas encore être libéré, démarrage de l'essai B.
5. Si cela ne fonctionne toujours pas, essayez svp le démarrage de P.
6. Si cela ne fonctionne toujours pas, jugez-svp moi démarrage (ceci renverra le robot à ses arrangements d'usine, fera attention).
7. Le support de robot peut-il être partagé par les robots multiples ?
No. par exemple, le support du robot A peut seulement être employé pour le robot A, pas pour le robot B ou C, pendant que ceci peut causer des défaillances du système.
8. Quels dossiers peuvent être partagés dans le support de robot ?
Si deux robots sont du mêmes modèle et configuration. Vous pouvez partager le programme RAPIDE et le dossier d'EIO, mais après avoir partagé, il doit également être vérifié avant qu'il puisse être employé normalement.
9. Quelle est l'origine mécanique des robots ? Où est l'origine mécanique ?
Chacun des six moteurs servo du robot a une origine mécanique fixe unique. L'arrangement incorrect d'origine mécanique du robot posera des problèmes tels que le mouvement limité ou incorrect du robot, de l'incapacité de marcher dans une ligne droite, et du sérieux dommages au robot.
10. Comment dégager l'alarme de surveillance d'action du robot 50204 ?
1. Modifiez l'action de robot surveillant des paramètres (dans le menu de surveillance d'action de panneau de commande) pour assortir la situation réelle.
2. Employez la commande d'AccSet de réduire l'accélération du robot.
3. réduisez v dans le data_ de vitesse l'option de putréfaction.
11. Comment manipuler l'alarme « 50296, différence de données de mémoire de SMB » quand le robot est mis sous tension pour la première fois ?
1. Calibrage choisi du menu principal d'ABB.
2. cliquez sur dessus ROB_ 1. écrivent l'écran de calibrage et la mémoire choisie de SMB.
3. « avancés » choisis, écrivent et cliquent sur « la mémoire claire d'armoire de commande ».
4. Après exécution, cliquez sur « étroit » et puis cliquez sur la « mise à jour ».
5. “armoire de commande permutée choisie ou bras robotique, mettant à jour l'armoire de commande avec des données de mémoire de SMB”.
12. Comment adapter la vitesse aux besoins du client du mouvement de trajectoire de robot dans le programme RAPIDE ?
1. Données choisies de programme du menu principal du pendant de enseignement.
2. Après conclusion du type de données Speeddata, cliquez sur nouveau.
3. cliquez sur dessus la valeur initiale, et les significations des quatre variables Speeddata sont : le v_ TCP représente la vitesse courante linéaire du robot, putréfaction de v_ représente la vitesse de rotation du robot, v_ Leax représente la vitesse de fonctionnement linéaire de l'axe externe, v_ Reax représente la vitesse de rotation de l'axe externe. S'il n'y a aucun axe externe, les deux derniers n'ont pas besoin d'être modifiés.
4. Les données adaptées aux besoins du client peuvent s'appeler dans le programme RAPIDE.
13. Dépannage de 6 défauts communs dans la réparation de moteur servo de robot d'ABB
1. Comment manipuler l'erreur de débordement de compteur d'erreur de moteur pendant la rotation ultra-rapide ?
Le défaut de débordement de compteur d'erreur de moteur se produit pendant la rotation ultra-rapide.
Contre-mesures 1 : Vérifiez si le câblage du cable électrique de moteur et du câble d'encodeur est correct et si le câble est endommagé.
Le défaut de débordement de compteur d'erreur de moteur se produit en entrant une longue impulsion de commande.
Le défaut de débordement de compteur d'erreur de moteur s'est produit lors du fonctionnement.
Contre-mesures 2 : Augmentez la valeur d'établissement de niveau de débordement du compteur d'erreur ; Ralentissez la vitesse de rotation ; Prolongez le temps d'accélération et de décélération ; La charge est trop lourde, et il est nécessaire de choisir un moteur de plus grande capacité à partir de zéro ou de réduire la charge, et installe des organismes de transmission tels que des réducteurs pour augmenter la charge.
2. Que devrait être fait si cela ne fonctionne pas quand il y a sortie d'impulsion ?
Dirigez la valeur courante de la sortie d'impulsion du contrôleur et si la lumière de sortie d'impulsion clignote, reconnaissez que l'impulsion de commande a été normalement accomplie et produit maintenant ;
Vérifiez si le câble de commande, le cable électrique, et le câble d'encodeur du contrôleur au conducteur sont câblés inexactement, endommagé, ou en contact pauvre ;
Vérifiez si le frein du moteur servo avec le frein a été maintenant ouvert ;
Dirigez si le panneau du conducteur servo reconnaît l'entrée des commandes d'impulsion ;
La commande courue d'opération est normale ;
La forme de contrôle doit choisir la forme de contrôle directionnel ;
Est le type d'impulsion d'entrée réglé par le conducteur servo compatible à l'arrangement de l'impulsion de commande ;
Assurez-vous que le côté positif de rotation que la commande est arrêtée, le signal d'arrêt d'entraînement de côté de rotation, et le contre- signal "Reset" d'erreur ne sont pas entrés, la charge est déconnectée, et l'opération à vide est normale. Vérifiez le système mécanique.
3. Queest-ce que je devrais faire s'il n'y a aucun rapport de surcharge avec la charge ?
S'il se produit quand le signal couru servo est relié et aucune impulsion n'est émise :
Vérifiez le câblage de cable électrique du moteur servo pour voir s'il y a n'importe quels dommages pauvres de contact ou de câble ; Si c'est un moteur servo avec un frein, le frein doit être allumé ; Est le gain de la boucle de vitesse a placé trop haut ; Est la constante de temps intégral de la boucle de vitesse a placé trop petit.
Si les seuls défauts de fonctionnement servo lors du fonctionnement :
Est le gain du circuit d'azimut a placé trop haut ; Est l'amplitude de placer l'achèvement a placé trop petit ; Vérifiez s'il n'y a aucun rotor verrouillé sur l'axe de moteur servo et ajustez les machines à partir de zéro.
4. Comment traiter les bruits ou les vibrations anormaux lors du fonctionnement ?
Câblage servo :
Employez les cables électriques normalisés, les câbles d'encodeur, les câbles de commande, et les câbles pour vérifier des dommages ; Vérifiez s'il y a des sources d'interférence près de la ligne de contrôle, et s'ils sont parallèles ou trop proches des cables électriques à forte intensité voisins ; Vérifiez s'il y a n'importe quel changement du potentiel du terminal à terre d'assurer excellent fondre.
Paramètres servo :
L'arrangement servo de gain est trop grand, et on lui recommande ajustent à manuellement ou activement les paramètres servo à partir de zéro ; Reconnaissant l'arrangement de la constante de temps du filtre de réponse de vitesse, avec une valeur initiale de 0, il est possible d'augmenter la valeur réglée par l'essai ; L'arrangement électronique de rapport de vitesse est trop grand, préconisant pour reconstituer aux arrangements d'usine ; Résonance entre le système servo et le système mécanique, examinant et ajustant la fréquence et l'amplitude de filtre à encoche.
Système mécanique :
L'accouplement reliant l'axe de moteur et le système d'équipement a dévié, et les vis d'installation n'ont pas été serrées ; L'engagement pauvre des poulies ou des vitesses peut également mener aux changements du couple de charge. Opération à vide d'essai. Si à vide l'opération est normale, contrôle s'il y a n'importe quelle anomalie dans la partie de collage du système mécanique ; Admettez si l'inertie, le couple, et la vitesse de charge sont trop grands, essai l'opération à vide, et si l'opération à vide est normale, réduisez la charge ou remplacez le conducteur et le moteur par une plus grande capacité.
5. Comment manipuler le contrôle inexact d'orientation et le positionnement pendant la réparation de moteur servo de robot d'ABB ?
Premièrement, reconnaissez si la valeur avouée réelle d'impulsion du contrôleur est compatible à la valeur prévue, et sinon, vérifiez et corrigez le programme ;
Dirigez si le nombre de commandes d'impulsion reçues par le conducteur servo assortit celui annoncé par le contrôleur. Sinon, contrôle le câble de commande ; Vérifiez si l'arrangement de la forme servo d'impulsion de commande est compatible à l'arrangement de contrôleur, tel que CW/CCW ou pulse+direction ;
L'arrangement servo de gain est trop grand, svp ajuste manuellement ou activement le gain servo à partir de zéro ; Le moteur servo est à erreurs cumulées enclines pendant le mouvement d'échange. On lui recommande de placer un signal mécanique d'origine dans les conditions permises par le processus, et effectue l'opération de recherche d'origine avant que l'erreur dépasse l'échelle permise ; Le système mécanique lui-même a la basse exactitude ou l'organisation anormale de transmission (telle que la déviation de l'accouplement entre le moteur servo et le système d'équipement).
6. la réparation de moteur servo de robot d'ABB, opération de contrôle directionnelle, défaut de survitesse a rapporté. Comment la manipuler ?
Dès que le signal couru servo sera relié, il déclenchera : vérifiez si le câblage du cable électrique de moteur servo et du câble d'encodeur est correct et intact.
14. Comment font les robots industriels d'ABB subissent l'entretien régulier ?
Avant le fonctionnement normal de la « inspection de frein », il est nécessaire de vérifier le frein de moteur de chaque axe. La méthode d'inspection pour le frein de moteur est comme suit :
1. course l'axe de chaque bras robotique dans sa position de charge maximum.
2. tour le brancher de sélection de mode de moteur le contrôleur de robot à la position de repos de MOTEURS.
3. Vérifiez si l'axe est en sa position originale. Si le bras mécanique maintient toujours sa position après que le moteur soit arrêté, il indique que le frein est en bon état.
Danger de fonction de perte de l'opération de décélération (250mm/s)
Ne changez pas le rapport de vitesse ou d'autres paramètres de mouvement de l'ordinateur ou du pendant de enseignement. Ceci affectera la fonction de l'opération de décélération (250mm/s).
15. Plusieurs points pour prêter l'attention à en employant les aides pédagogiques sans risque :
Le bouton permettant de dispositif installé sur le pendant de enseignement, une fois appuyé sur à mi-chemin, change le système en MOTEURS SUR le mode. Quand le bouton est libéré ou entièrement appuyé sur, les évolutions des systèmes aux MOTEURS OUTRE du mode.
16. Afin d'employer les aides pédagogiques sans risque, les principes suivants doivent être suivis :
1.When le bouton permettant de dispositif ne peut pas perdre sa fonction pendant la programmation ou la correction, et le robot n'a pas besoin de se déplacer, libérer immédiatement le bouton permettant de dispositif.
2. Quand le personnel de programmation entre dans un secteur sûr, ils doivent toujours porter le pendant de enseignement sur leur corps pour empêcher d'autres de déplacer le robot.
17. En travaillant dans la marge fonctionnante du bras robotique, on doit observer les points suivants :
1. Le commutateur de sélection de mode en marche le contrôleur doit être mis à la position manuelle afin d'actionner le dispositif permettant pour déconnecter l'ordinateur ou pour fonctionner à distance ;
2. Quand le commutateur de sélection de mode est allumé
3. attention de salaire à l'axe de rotation du bras robotique, faire attention quand les cheveux ou l'habillement obtiennent mélangés. En outre, attention de salaire à d'autres composants choisis ou équipement sur le bras robotique ;
4. Vérifiez le frein de moteur de chaque axe.
18. Déviation de contact
Phénomène 1 : La position touchée par les doigts ne coïncide pas avec la flèche de souris.
Raison : Après installation du programme de conducteur, le pendant de enseignement n'a pas verticalement touché le centre de la position de boudine pendant le calibrage.
Solution : Recalibrez la position.
Phénomène 2 : Quelques secteurs ont le contact précis, alors que d'autres ont la déviation dans le contact.
Cause : Un grand nombre de poussière ou d'échelle s'accumule sur les rayures acoustiques de réflexion autour de l'écran tactile d'onde acoustique extérieure, qui affecte la transmission des signaux acoustiques.
Solution : Nettoyez l'écran tactile, prêtant l'attention particulière à nettoyer les rayures de réflexion d'onde sonore de tous les côtés de l'écran tactile. En nettoyant, déconnectez l'alimentation d'énergie en carte ordre d'écran tactile.
19. Contact pendant de enseignement aucune réponse
Phénomène : En touchant l'écran, les flèches de souris ne se déplacent pas et il n'y a aucun changement en position.
Raison : Il y a beaucoup de raisons de ce phénomène, comme suit :
1. La poussière ou l'échelle accumulée sur les rayures acoustiques de réflexion autour de l'écran tactile d'onde acoustique extérieure est très sérieuse, entraînant l'écran tactile pour travailler ;
2. défaut de fonctionnement d'écran tactile ;
3. La carte ordre d'écran tactile a fonctionné mal ;
4. La ligne d'écran tactile a fonctionné mal ;
5. La porte série des défauts de fonctionnement de centre serveur ;
6. Le système d'exploitation de l'enseignement pendant a fonctionné mal ;
7. erreur d'installation de conducteur d'écran tactile.
Solution : Observez le voyant de signalisation de signal d'écran tactile, qui clignote régulièrement dans des circonstances normales, approximativement une fois par seconde.
En touchant l'écran, le pendant de enseignement disparaît noir, qui est un problème complexe. Si l'économie d'énergie de contre-jour est placée, l'écran noir est normal ; Si le deuxième mot dans le secteur de commandes système est accidentellement actionné, l'écran ira également noir. Si les deux premiers points sont exclus, mise à jour aux derniers progiciels pour l'examen.
Envoyez-votre enquête directement nous

